
一款智能機器人產品從idea到完成設計的整個過程,大致包含五個模塊,其中軟體、硬體、演算法是對產品能力在不同維度的的詳細分解,那麼在面向用戶時,機器人產品能力是以何種方式體現的呢?本文作者對智能機器人產品的任務設計要素進行了分析,一起來看一下吧。

在談機器人任務設計之前,我們先簡單了解下一款智能機器人產品從idea到完成設計(這裡不講生產)的整個過程,整個過程大致會包含五個模塊:產品價值定義、產品能力定義、硬體產品設計、軟體產品設計和演算法模塊定義。
1)產品價值定義
產品價值定義可以從兩個方面進行定義,一方面是用戶側,主要進行用戶定位、用戶需求的定義;另一方面是公司側,主要是市場定位、公司需求的定義。
2)產品能力的定義
產品能力的定義,一般包含基礎能力的定義和價值能力的定義;基礎能力即指當前行業的產品必須具備的基本能力,可以從競品調研分析或市場分析報告等渠道獲取;價值能力的定義依賴於上一步產品價值的定義,價值能力服務於產品價值,核心是滿足用戶和公司的需求,也是體現產品差異化的重要因素。
3)硬體產品定義
硬體產品的定義,主要包含ID設計、結構設計、元器件規格選型等方面;產品能力的實現依賴於產品硬體,硬體產品的定義即是對產品能力所需的硬體部分進行的詳細分解。
4)軟體產品定義
軟體產品的定義,主要包含業務流程設計、UI設計、功能說明等方面;作為一款智能機器人產品,其核心當然是硬體產品部分,軟體產品輔助硬體產品為用戶提供更好的體驗,更好地滿足用戶的需求。
5)演算法模塊的定義
演算法模塊的定義:主要包含演算法的運用場景、目的、要求。演算法、軟體、硬體共同詮釋機器人的產品能力,演算法能力定義著「智能機器人」產品中的「智能」部分,演算法能力的好壞往往決定著一款智能機器人產品到底是一個笨拙的玩具還是一款超出用戶預期的「機器人」。

一、機器人任務設計要素
前面簡單介紹了一款智能機器人產品從idea到完成設計的整個過程,其中軟體、硬體、演算法是對產品能力在不同維度的的詳細分解,那麼在面向用戶時,機器人產品能力是以何種方式體現的呢?
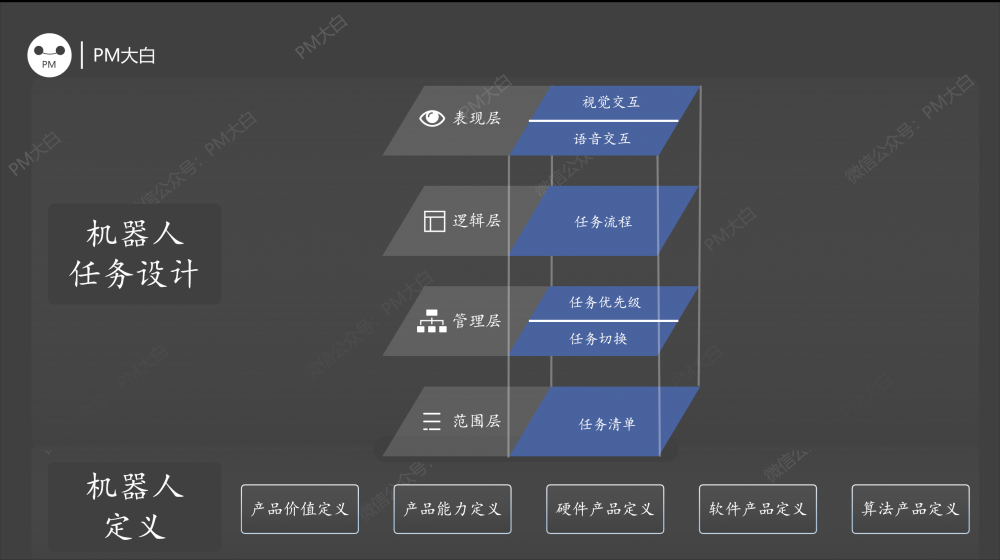
答案是「任務」,所以機器人的任務設計尤為關鍵,根據個人對機器人任務設計的理解以及最近對工作中一些經驗的總結,機器人的任務設計主要包含4個層面:
- 任務範圍層:機器人能力邊界的框定。
- 任務管理層:機器人不同任務之間邏輯關係的定義。
- 任務邏輯層:機器人具體一個任務在執行時內部完整邏輯的定義。
- 任務表現層:機器人在執行任務時,用戶看到的、聽到的、感受到的機器人的各種外在的表現。
1. 任務範圍層
機器人的能力是通過一個一個任務來呈現到用戶面前的,機器人的任務清單需要覆蓋機器人運行時的所有場景,就像產品經理在設計軟體業務流程時需要窮盡用戶在下載軟體后的各種場景一樣。
2. 任務管理層
任務之間邏輯關係的定義和管理,就好比任務的管理中心一樣,在什麼場景下哪一種或多種任務同時啟動,在什麼場景下哪些任務需要結束;以及定義清楚所有任務在執行過程中可調用的通用邏輯(有點類似任務中台)。
1)任務觸發類型:APP觸發、語音觸發、場景觸發、定時觸發。
2)任務分類:基礎功能,業務功能。
3)任務切換:任務正常觸發、任務衝突中斷、任務無法完成自動結束、任務完成後自動結束。
4)任務關係:任務與任務間的關係定義;任務優先順序、任務并行、任務互斥、任務串列規則的定義。
5)任務隔離:通過機器人的不同模式將任務人為進行隔離,不同模式下只能執行對應模式下的任務清單;類似機器人的工程模式、設置模式、升級模式、檢修模式(自檢模式、手動檢修模式)和工作模式等,即是人為對對機器人的任務進行了一個分組和隔離,不同模式的前提下只能執行相應的任務清單。
3. 任務邏輯層
任務內部的完整邏輯描述,描述具體一個任務從觸發到結束整個過程中的遇到每一個細節(場景),以及機器人對每一個細節的處理和交互。
1)任務觸發:任務的觸發條件和觸發方式。
2)任務過程:任務執行過程中分哪幾個階段,每個階段執行的具體流程。
3)任務中斷:在任務啟動后,任務中斷的因素有哪些,中斷後如何交互。
4)任務完成:任務完成的標誌。
4. 任務表現層
機器人在執行任務的過程中,對各種環境的反應,其中包括機器人內部的環境和機器人外部周圍的環境,機器人做出的交互反應類型主要包含:視覺交互、語音交互、燈效交互、移動交互、姿勢交互。
二、機器人任務設計要素應用
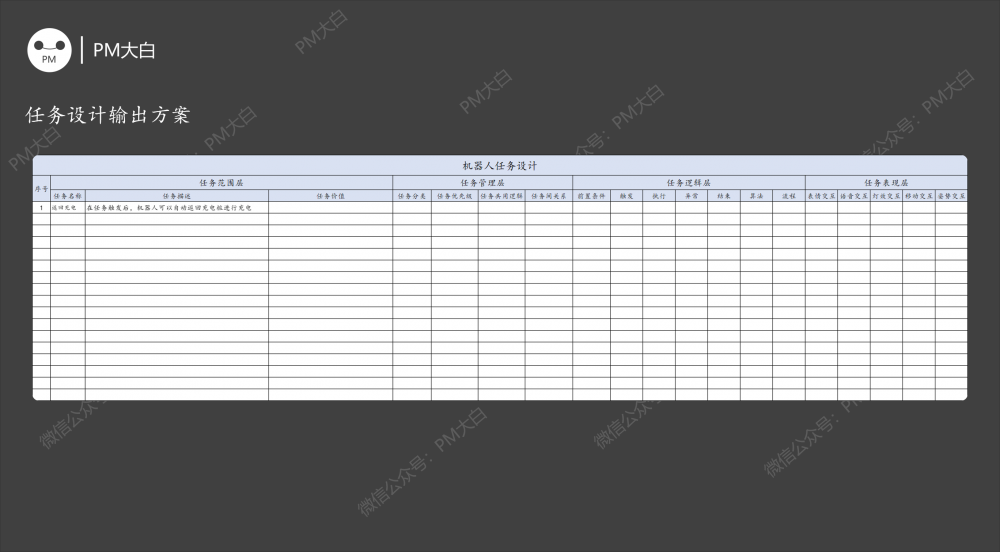
上面已經介紹了機器人任務設計的四要素,以及機器人任務設計的重要性和方法,只講方法論不講實際應用那是耍流氓,下面給大家介紹一個智能機器人的具體任務設計過程:這裡我們就拿最基本的[返程充電]任務來說事。
1. [充電任務]定義(範圍層)
1)任務名稱:返回充電。
2)任務描述:在任務觸發后,機器人可以自動返回充電樁進行充電。
3)任務價值:體現小丫的智能性,提升用戶體驗。
2. [充電任務] 與其他任務間的關係(管理層)
1)任務分類:基礎任務。
2)任務優先順序:5(高);沒有該功能會導致用戶體驗急劇下降。
3)任務公用邏輯:指令識別判斷邏輯、任務衝突判斷邏輯、移動受阻判斷邏輯。
4)任務公用流程:喚醒流程、導航流程、重定位流程。
3. [充電任務] 的執行邏輯(邏輯層)
1)前置條件:工作模式下+已完成建圖+未在充電+當前沒有其他優先順序更高的任務正在執行。
2)觸發條件
- APP觸發:用戶通過手機一鍵下達【回去充電】任務。
- 語音觸發:用戶通過語音指令詞【回去充電】觸發。
- 場景觸發:機器電量降低至X%時,自動結束當前任務,開始執行「返回充電」任務。
3)執行
- 尋找充電樁:獲取充電樁在地圖上的位置信息。
- 路徑規劃:規劃當前機器人所在位置與充電樁兩點之間的最佳移動路線。
- 移動過程:避障(遇到障礙物)、重定位(定位丟失)、移動受阻(無法移動)。
- 對樁過程:尋找充電樁、對樁成功、對樁失敗。
- 充電成功:接通電源。
4)異常
- 導航:無法避障、定位丟失、路線規劃失敗、移動受阻。
- 對樁:無法找到充電樁、對樁失敗。
- 充電:無法接通電源。
5)結束
- 任務未完成結束:APP操控結束、結束任務指令、電量=0結束、長時間對樁失敗導致任務結束、無法接通電源導致任務結束。
- 任務正常結束:接通電源任務完成,[返回充電]任務結束。
6)演算法:在[返程充電]任務中應用到導航演算法。
7)流程(見圖)
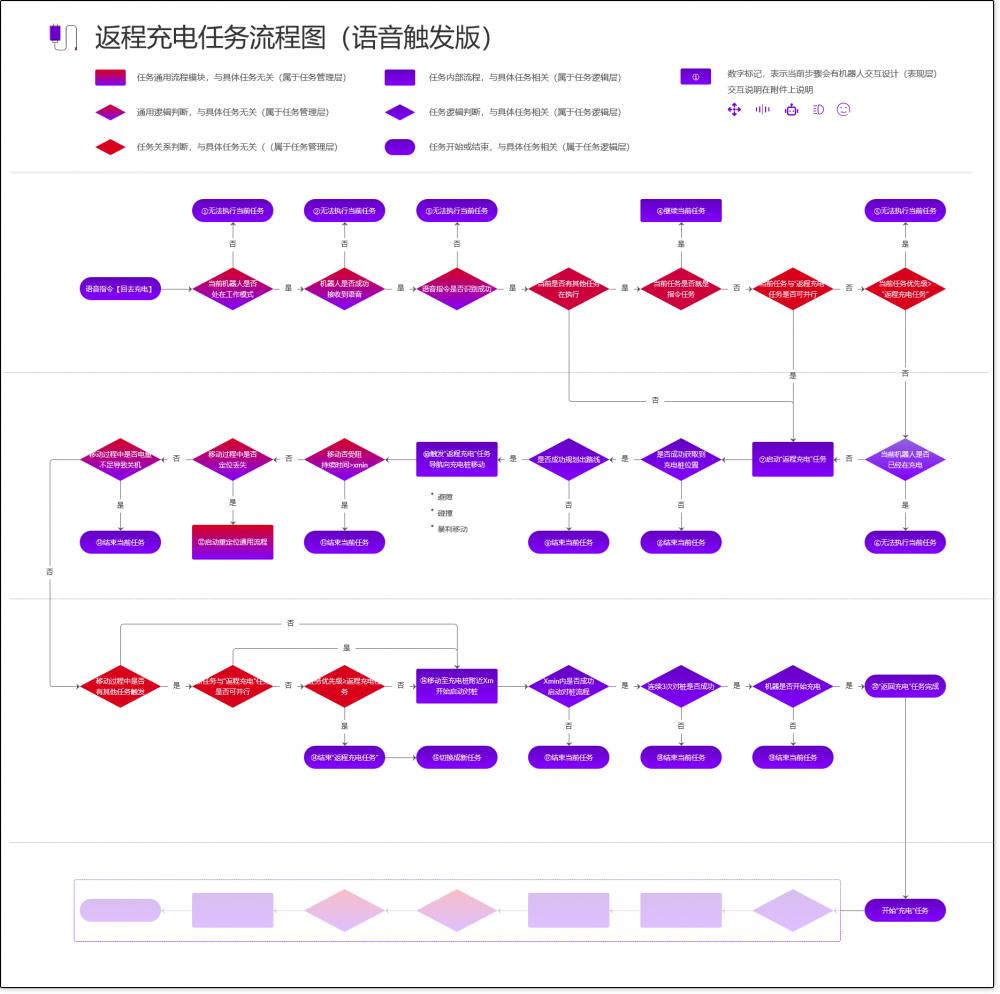
4. [充電任務] 在執行過程中的交互設計(表現層)
流程圖中所有用數字標記的步驟均可以設置機器人的交互反饋(①②③……),根據 [返程充電] 任務流程的設計,其中交互設計可以分為以下四個階段:
- 觸發時的交互
- 移動中的交互(執行任務過程中)
- 對樁時的交互(執行任務過程中)
- 完成任務時的交互
流程圖中的「⑦啟動返程充電任務」點的交互可以設計為:
- 語音:大白要回家充電啦,主人待會見咯~么么噠。
- 燈效:常規亮度、波浪狀、持續3個波浪(之後恢復至移動時的默認燈效狀態)。
- 表情:顯示大白機器人奔向充電樁的動畫,持續5s(之後恢復至移動時的默認的移動表情)。
- 姿勢:姿勢恢復到默認狀態。
- 移動:移動速度按照Xm/s移動。
三、總結
任務可以說是機器人產品的最小价值性單位,用戶可以因為機器人具有某一個特別的任務能力,而去購買它,也會因為機器人無法執行某種任務,而放棄購買或者遺棄它。
任務往上聚集可以形組合成機器人的各種功能模式(工作模式、工程模式、自檢模式、設置模式……)和服務模式(回家模式、離家模式、關懷模式……),向下分解可以分解出各種流程組件和狀態。
機器人的產品價值、軟體能力、硬體能力、演算法能力均需要通過機器人在現實場景中能完成的任務來呈現給用戶,SO機器人的任務設計尤為重要。希望本文的機器人任務設計方法對大家有用~
青花瓷中水泡蔥,老闆叫你去敲鐘!
好了,就寫到這吧~
專欄作家
andy,微信公眾號:PM大白,一名產品經理行業的小獸醫
本文原創發佈於人人都是產品經理。未經許可,禁止轉載
題圖來自 unsplash,基於 CC0 協議
該文觀點僅代表作者本人,人人都是產品經理平台僅提供信息存儲空間服務。